�O�ӽ��|���g(sh��)
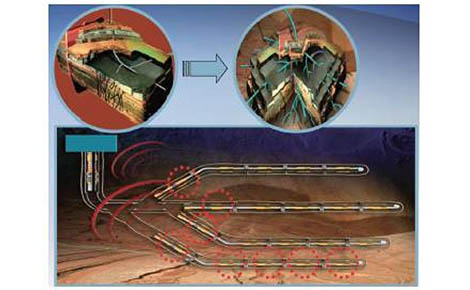
�ѽ�(j��ng)��(y��ng)�õ���ӽ��|���g(sh��)��Maximum Reservoir Contact�����QMRC����һ�N���ܶ��֧����������������� �������@5km�c���ӽ��|�� ���֧ ˮƽ�������U���Ͳ� й����e������͚�a(ch��n)������ԓ���g(sh��)�����ܡ��Ǿ��|(zh��)����Ч���@��������ɳ�ذ���������III������32��MRC����ÿ��a(ch��n)�������_(d��)42857t���Ȼ��������MRC����ÿ����֧��Ҫ���b�Cе���ƹܾ��� ���������Ԍ��F(xi��n)���挦���·�֧�Ŀ��ƣ���(d��o)��ÿ�ھ��ķ�֧��(sh��)���ܵ������������δ������O�ӽ��|���g(sh��)��Extreme Reservoir Contact��������QERC�������ßo�����Ƽ��g(sh��)�����pС�Cе���ƹܾ����������Ӿ��·�֧��(sh��)��������Փ�Ϸ�֧��?d��ng)?sh��)����������������ڷ�֧���пɰ��o�ޔ�(sh��)���� �����y���D1�����
�D1 �O�ӽ��|���g(sh��)
����������Ƽ��g(sh��)
���y(t��ng)������������������̎��ϵ�y(t��ng)�B���S�������������������P(gu��n)����Ĕ�(sh��)��(j��)�M(j��n)����������������Ͳ؉������ض�������������w�M���������ܾ����w���͚�(li��n)��վ��Ϣ�����ͨ�^���r�@ȡ�Ĕ�(sh��)��(j��)�������M(j��n)�й������ڹ�����III�����������ÿ�ھ��а��bһ�������ñO(ji��n)�yϵ�y(t��ng)��������Ͳ،��r��Ϣ������������������̎��վ�����r��(sh��)��(j��)�M(j��n)�����Ϸ��������F(xi��n)������Č��r�O(ji��n)��������δ���������������������M(j��n)�������ұO(ji��n)����ȫ�Ԅӿ��ưl(f��)չ���������Ͳؔ�(sh��)��(j��)��������Ϣ�����M(j��n)�������������F(xi��n)���r�Ͳؔ�(sh��)ֵģ�M���ó���ѵ�ע�ɱ���������¿����y�l(f��)��ָ���������ҹ����������
�oԴ����O(ji��n)�y���g(sh��)
�͚���_�l(f��)�^������������Ӳ���l(f��)�������¼�����Ҏ(gu��)�������O(ji��n)�y�������������oԴ����O(ji��n)�y���g(sh��)�܉�O(ji��n)�y�@Щ�����¼��������ͨ�^�@ȡ�ĵ�����Ϣ������Ͳ�����Ĕ��Ӻ��ѿp�ֲ���������Դˁ����L�،����w���뾮Ͳ������ͨ����������oԴ�����g(sh��)�܉�?q��)��r�O(ji��n)���Ͳ�����Ƿ����ͱO(ji��n)�����w�ڃ��������ӵ�һ�N�·������������Ͳع��������µ�ˮƽ�������ԓ���g(sh��)�ڔ�����������������ˮ�����ѱO(ji��n)�y��ˮ�(q��)ǰ���O(ji��n)�y����õ��ˑ�(y��ng)�������ԓ���g(sh��)Ŀǰ߀̎�����A�Σ�δ�팢���ɞ��ͲرO(ji��n)�y�c�������������g(sh��)�����
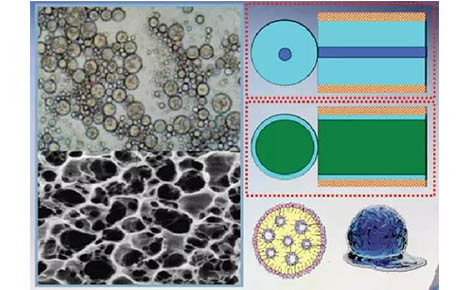
���Ӽ{�יC����
�יC���˵ijߴ�������^�l(f��)ֱ����1�������������Sע�����w�� �����M(j��n)�냦�ӣ��D2����������{�יC�����ڃ��������ӕr���������Ͳ؉�������ضȺ����w����������惦��Ϣ�������ڲɳ������w�л����@Щ�{�יC���ˣ����d��惦���Ͳ��P(gu��n)�I��Ϣ�����Դˁ팦�Ͳ��M(j��n)�������������ɳ�ذ����ѽ�(j��ng)�о��˼{�יC�����ڵ��¡����С��r�������һЩ���أ������ߴ����������ȡ����W(xu��)���|(zh��)����c �rʯ��������á��ڃ��� ��϶�е��\���ٶȵ���������2010���M(j��n)���˳ߴ��10nm�����]������̽�y�����ļ{�יC����ע���c���լF(xi��n)���yԇ��������C�˼{�ׂ��������зdz��ߵĻ����ʺ��^�õķ�(w��n)���������� �����������Ŀǰ��������ڇLԇ?y��n)��ü{�יC��������̽�y�����Ͳ�������Ԍ��F(xi��n)���ڃ� �������^���Ќ��r�xȡ�͂�ݔ��(sh��)��(j��)���
�D2 �{�יC����
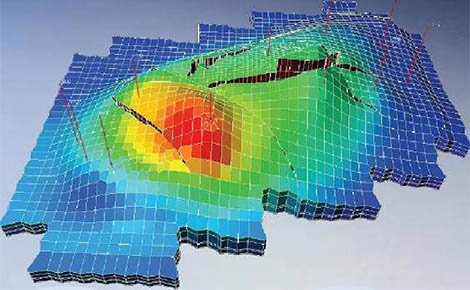
ǧ�W(w��ng)��(sh��)ֵģ�M���g(sh��)
�ѽ�(j��ng)Ͷ�둪(y��ng)�õ����S�����g(sh��)��ģ�M�㷨�ɽ��������Ͳ����Եĸ߷ֱ��� ���|(zh��)ģ�͡�����(d��ng)�@Щģ����������ģ�M�r���������ڬF(xi��n)��̎����ģ�M�W(w��ng)��Ĕ�(sh��)�������������ʹ�õ��|(zh��)ģ����ģ�M֮ǰ����Ȍ���̖�Ŵ�������p�ن�Ԫ��(sh��)������ɷֱ��ʴ������������δ���� �Ͳ�ģ�M������Ҫ����̖�Ŵ��Ԍ��F(xi��n)�߷ֱ���ģ�M���������������ģ�M�Ͳ�չ����e��280km��26km�ļ��ߠ�������������_(d��)���@һĿ������Ͳؔ�(sh��)ֵģ�M��ģ�M�W(w��ng)��(sh��)����횏�Ŀǰ�������ӵ�ǧ�����ϣ��D3����ɳ�ذ���Ŀǰ��ģ�Mģ�Ͳ���300��400�f���W(w��ng)��������������аl(f��)̎��2580�f���W(w��ng)���̎����������ԓģ��1d�܉�ģ�M�����_�l(f��)60��Ěvʷ��(sh��)��(j��)����A(y��)�y����Ҋˮ�r�g����δ�팢���F(xi��n)10�|�W(w��ng)��(ji��)�c��ģ�M�����������(sh��)ֵģ�M���g(sh��)�����µĸ߶�������
�D3 ǧ�W(w��ng)��(sh��)ֵģ�M���g(sh��)
�������w���g(sh��)
�������w���Ͳ����܉����(j��)�h(hu��n)���Ԅ��{(di��o)����������M(j��n)��،Ӻ����Լ��ķ�ʽ�Ԅӹ������D4��������������Ͳ� ��ˮ���I(y��)������������w���������B�ʸ��Ԅ��� �黯 ���z��������(d��ng) ˮ���뾮Ͳ�r����������w�cˮ������Û����ˮ�͌����������ֹˮ���뾮Ͳ����������͕r�������w Óˮ�տs������M(j��n)�Ќ��g����������ɴ˲���Ҫ���÷�������;��M(j��n)�з���������p����ʩ���r�g�����I(y��)�ɱ�����ڬF(xi��n)����(y��ng)�����������������w�����ڽ����؎���δ������냦�Ӄ�(n��i)������ڸ�����(n��i)�l(f��)�]�����������������w���g(sh��)Ŀǰ߀���о��l(f��)չ���������ֻ�ܑ�(y��ng)�����ض����Ͳؗl���������������ڲ����I(l��ng)��ȡ�óɹ���
�D4 �������w����(j��)�������c�ԄӸ�׃���|(zh��)
���������g(sh��)
��������ͬ��һ�����������������������������·�֧�������@�������ۺ�������������������ܷ�֧�����Ԅ��� ���͌����죬��(d��ng)ԓ���͚��_���������P(gu��n)�]ԓ��֧�������� �������͌����죨�D5���������Ŀǰ�����F(xi��n)�������ƺ����^�b�h(yu��n)�����ʯ���̼��g(sh��)�IJ����M(j��n)��������u���@һĿ��(bi��o)���������� �@�����g(sh��)�� ֱ����ˮƽ����������ٵ����֧�������ܾ��¿����y�����ͨ�^ ��(ji��)���P(gu��n)�]��֧������������w�܉��׃������׃�ԁ������;���֧���_�����P(gu��n)�]�����±O(ji��n)�y���g(sh��)�͵�����Ƽ��g(sh��)���Է����������w���|(zh��)���A(y��)�yҊˮ�r�g����Դ˞���A(ch��)�������ְl(f��)չ�˘O�ӽ��|���g(sh��)��MRC������ӽ��|���g(sh��)��ERC�������������Ԅ� �@�M(j��n)��Ŀǰ�аl(f��)�y�c��������� �B�m(x��)���@�����߉�ˮ�����@�������� �����@�����ʽ�@̽�@���ȼ��g(sh��)�İl(f��)չ���������F(xi��n)���������Ԅ��@�M(j��n)������
�D5 ���������g(sh��)
�������D(zhu��n)�ٿƄӑB(t��i)��






 China
China English
English
